Referensi :
Referensi: Rochim, Wifki Ato'ur. 2018. "Perancangan Sistem Pengendali Suhu Optimalisasi Daya Panel Surya Menggunakan Logika Fuzzy". Skripsi. Malang: Universitas Brawijaya
Abstrak
Energi matahari bisa dimanfaatkan sebagai energi alternatif yang potensial. Energi listrik yang dihasilkan panel berada pada suhu 25 °C atau dibawahnya. Logika fuzzy dipilih karena mempunyai kelebihan motode-metode lainnya, yaitu mudah dimengerti, fleksibel, mampu memodelkan fungsi-fungsi non-linear y.
Pendahuluan
Sarana-sarana penggunaan sebuah energi diperlukan suatu kebijakan atau pengaturan yang terencana dan lebih baik yang biasa disebut sebagai konservasi energi. Indonesia adalah salah satu negara yang berada kawasan garis khatulistiwa, dan selalu mendapatkan intensitas cahaya matahari. Sebagaimana suhu panel surya meningkat diatas standar suhu normal 25 °C, yang akan diproses di mikrokontroler. Aliran elektron akan terhambat oleh panas, karena panas merupakan hambatan listrik dalam kasus ini. Beberapa kelebihan dari logika fuzzy digunakan sebagi metode untuk pengambilan keputusannya. Maka dari itu diperlukan suatu sistem untuk mengendalikan suhu agar daya yang dihasilkan panel surya tetap optimal.
Metode Penelitian [kembali]
a. Perancangan Sistem
Agar penelitian yang dilakukan terstruktur, maka dibuatlah tahap perancangan sistem ini. Pada tahap perancangan sistem ini akan membahas tentang blok diagram sistem sebagai bahasan awal, dilanjutkan dengan membahas perancangan perangkat keras (skematik diagram sistem, sistem kendali perangkat, penempatan sensor LM35, dan penempatan motor DC), serta perancangan perangkat lunak (diagram alir sistem, fuzzifikasi, inferensi fuzzy, dan defuzzifikasi).
 |
| Diagram Alir Metode Penelitian |
b. Perancangan Perangkat Keras
Perangkat LM35 dalam sistem berguna sebagai input yang mengambil nilai suhu dari panel surya, dan Arduino Uno (yang sudah ditanam logika fuzzy) digunakan sebagai pemroses untuk menetukan keputusan. Driver motor L298N digunakan sebagai pengendali motor DC (kipas) setelah menerima output dari Arduino Uno. Gambar dibawah ini merupakan blok diagram dari komponen-komponen dirancang.
 |
| Blok Diagram Sistem |
c. Implementasi Sistem
Sebagai tindak lanjut dari pencangan sistem, maka dilakukanlah implementasi sistem. Implementasi ini merangkai semua hasil dari perancangan sistem. Pada tahap implementasi sistem ini akan membahas tentang implementasi perangkat keras (implementasi sensor dan aktuator, implementasi prototype sistem, dan implementasi hardware keseluruhan), dan implementasi perangkat lunak (implementasi logika fuzzy dan implementasi program utama).
d. Perancangan Fuzzy Logic
Pada perancangan fuzzy logic ini, peneliti
menggunakan jenis fungsi keanggotaan trapezium
yang dinyatakan dengan persamaan sebagai berikut:

Tahap ini adalah untuk membentuk fuzzy input dari nilai-nilai input yang sebelumnya berupa crisp input. Terdapat 5 keanggotaan trapesium yang terdiri dari dingin, normal, hangat, panas, dan sangat panas. Masing- masing sensor suhu yang membaca suhu dari panel surya memiliki himpunan fuzzy yang sama.
 |
| Fungsi Keanggotaan Input |
Untuk input, pemilihan membership function yang menjadi 5 keanggotaan dikarenakan membership ini memiliki rentang yang tidak terlalu jauh antar fungsi keanggotaan. Penulis membuat nilai suhu terendah dari nilai 26 °C karena pada suhu dibawah 26 °C inilah panel dapat bekerja maksimal, dan penulis membuat nilai suhu tertinggi pada nilai 50 °C karena menurut asumsi penulis suhu tersebut sudah sangat panas. Dengan demikian untuk 5 keanggotaan input, maka penulis membuat keanggotaan dingin dengan nilai suhu kurang dari 26 °C, keanggotaan normal dengan nilai suhu 26-34 °C, keanggotaan hangat dengan nilai suhu 34-42 °C, keanggotaan panas dengan nilai suhu 42-50 °C, dan keanggotaan sangat panas dengan nilai suhu lebih dari 50 °C.
Hasil dan Pembahasan [kembali]
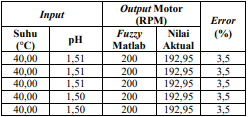
Fuzzy Matlab menghasilkan nilai RPM sebesar
200 RPM, sedangkan untuk nilai aktual
menghasilkan output RPM sebesar 192,95 RPM.
Nilai error yang didapat rata-rata sebesar 3,5%
sebanyak lima kali percobaan. Untuk perhitungan
nilai error diperoleh berdasarkan persamaan
berikut:

Pada pengujian yang telah dilakukan didapati
bahwa nilai error yang terjadi dengan mengambil
sampel sebanyak lima percobaan terdapat nilai
error sebesar 2%-3,5 % antara simulasi dengan
pada plant.
Prosedur Percobaan
STEP 1 : Susun rancangan konsep sistem kontrol dengan logika fuzzy
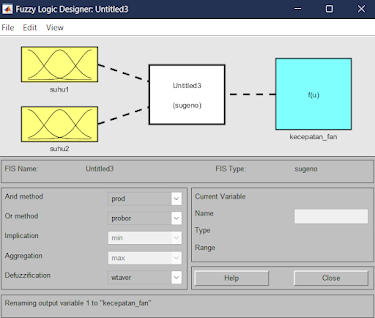
STEP 2 : Setelah konsep sistem kontrol dibentuk, maka kita dapat membuat pemrogramannya. Ketiklah “fuzzy” pada command window untuk membuka jendela Fuzzy Inference System (FIS) editor, sehingga muncul tampilan seperti gambar di bawah ini:


Jendela Fuzzy Logic Designer
STEP 3 : Pilih file >> new fis.. >> sugeno. Karena model Sugeno menggunakan fungsi keanggotaan singleton yang lebih sederhana dibanding model Mamdani, maka penulis menggunakan model Sugeno dalam penelitian ini. Keanggotaan singleton memiliki nilai derajat keanggotaan 1 pada suatu nilai tunggal dan bernilai 0 pada semua nilai yang lain.

STEP 3 : Pilih edit >> add variable >> input untuk menambah variable input. Beri nama input1 sebagai suhu1 dan input2 sebagai suhu2 serta ouput1 menjadi kecepatan_fan

STEP 4 : Pilih edit >> membership function untuk membuat fungsi keanggotaan setiap variabel. Pada saat kondisi Default membership function biasanya berjumlah 3. Karena pada penelitan kali ini terdapat 5 keanggotan, dikarenakan dikarenakan membership ini memiliki rentang yang tidak terlalu jauh antar fungsi keanggotaan.

gambar setelah ditambahkan membership baru


 |
| Input MF1 sesuai dengan nilai di atas |
 |
| MF2 |
 |
| MF3 |
 |
| MF4 |
 |
| MF5 |
Setelah semua input dimasukkan ke masing-masing membership function, maka akan menampilkan grafik seperti ini.
 |
| Gambar Grafik Input1(suhu1) |
lakukan langkah yang sama pada ouput 2 (suhu2).

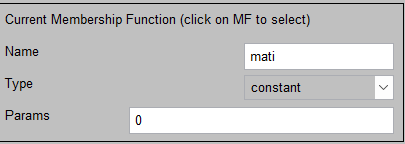
STEP 6 : Pada variabel Kecepatan fan memiliki 5 keanggotaan defuzifikasi seperti gambar berikut
 |
| fungsi keanggotaan defuzifikasi |
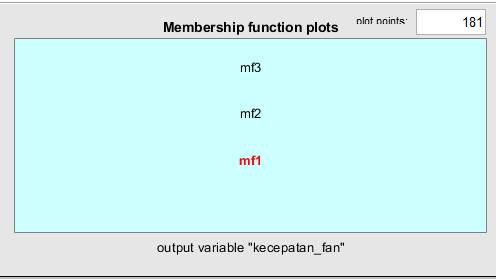 | ||
kondisi default akan menampilkan 3 mf, tambahkan 2 mf lagi dengan menekan tab edit, kemudian add MFs.. dengan type constant.
 mf2  mf3  mf4  mf5 Setelah diubah masing-masing parameter dari membership functionnya makan akan ditampilkan seperti berikut 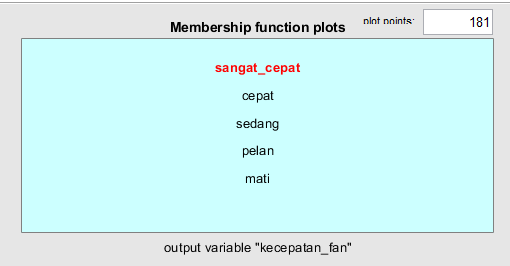 |
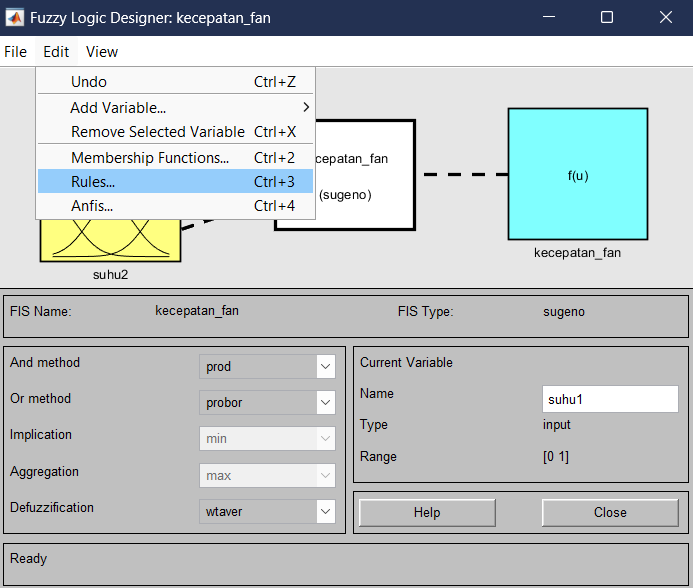
STEP 7 : Pilih edit >> rules untuk membuka jendela rule editor
 |
| tampilan rule editor |
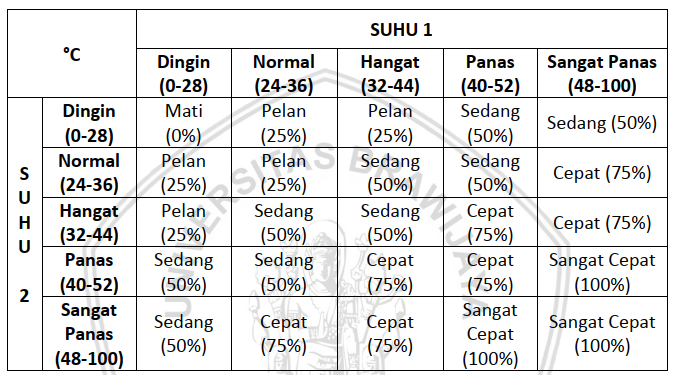 |
| Rule base kecepatan_fan |
 |
| tampilan rules editor setelah ditambah rules. |

STEP 9: Pilih view >> surface, untuk melihat grafik 3D antara suhu1, suhu2, dan kecepatan_fan
Gambar Hasil Percobaan
Kesimpulan [kembali]
Berdasarkan hasil dari 10 kali pengujian pada saat tidak menggunakan sistem dapat diperoleh rata-rata waktu yang dibutuhkan panel surya untuk kembali ke suhu normal adalah 16 menit 49 detik, sedangkan dari 10 kali pengujian pada saat menggunakan sistem dapat diperoleh rata-rata waktu yang dibutuhkan panel surya untuk kembali ke suhu normal adalah 7 menit 27 detik. Berdasarkan dari hasil tersebut diketahui bahwa sistem dapat mengoptimalkan waktu pendinginan suhu dari panel surya hingga 9 menit 22 detik dibandingkan dengan pendinginan suhu panel surya pada saat tidak menggunakan sistem pengendali suhu panel surya.
Daftar Pustaka [kembali]
- B. S. Siregar, A. N. Jati, and D. Darlis, “Analisis Logika Fuzzy Sebagai Metode Kendali Pada Mesin Pencampuran Zat Cair,” e-Proceeding of Engineering, vol. 2, no.1, pp. 625-630, 2015.
- D. L. Rahakbauw, F. J. Rianekuay, and Y. A. Lesnussa, “Penerapan Metode Fuzzy Mamdani untuk Memprediksi Jumlah Produksi Karet (Studi Kasus: Data Persediaan Dan Permintaan Produksi Karet pada PTP Nusantara XIV (Persero) Kebun Awaya, Teluk Elpaputih, Maluku - Indonesia),” Jurnal Ilmiah Matematika dan Terapan, vol. 16, no. 1, pp. 119-127, 2019.
- R. N. Aini, “Optimasi Konsentrasi Pengemulsi Terhadap Tingkat Pengembangan dan Daya Terima Roti Tawar Berbahan Dasar Tepung Singkong,” Disertasi Doktor, Universitas Muhammadiyah Surakarta, 2015.
- A. F. Saragih, P. Pangaribuan, and A. S. Wibowo, “Sistem Kendali Mixer Otomatis di Industri Makanan,” e-Proceeding of Engineering, vol. 4, no. 3, pp. 3106-3113, 2017.
- A. F. Saragih, P. Pangaribuan, and A. S. Wibowo, “Sistem Kendali Mixer Otomatis di Industri Makanan,” e-Proceeding of Engineering, vol. 4, no. 3, pp. 3106-3113, 2017.
- F. Suryatini, M. Maimunah, and F. I. Fauzandi, “Implementasi Sistem Kontrol Irigasi Tetes Menggunakan Konsep IoT Berbasis Logika Fuzzy Takagi-Sugeno,” JTERA (Jurnal Teknologi Rekayasa), vol. 4, no. 1, pp. 115-124, 2019.
- S. Romadhan, B. Setiyono, and S. Sumardi, “Menggunakan Kontrol Fuzzy Untuk Pengaturan Suhu Cairan Berbasis Atmega16,” Transient, vol. 3, no. 4, pp. 90-95, 2014.
- M. Abrori and A. H. Prihamayu, “Aplikasi Logika Fuzzy Metode Mamdani dalam Pengambilan Keputusan Penentuan Jumlah Produksi,” Kaunia vol. XI, no. 2, pp. 91-99, 2015.
- I. S. Doraya,
“Pengaruh Emulsifier Terhadap Stabilitas Emulsi Salad Dressing dari
Minyak Kedelai dan Air Jeruk Lemon,” Tugas Akhir Diploma
Fakultas Teknik, Universitas Diponegoro, Semarang,
2012.
- I. W. R. Ardana and I. P. Sutawinaya, “Pemodelan Sistem Kontroler Logika Fuzzy Pada Pengaturan Kecepatan Motor Induksi Menggunakan Perangkat Lunak Matlab/Simulink,” Jurnal Matrix, vol. 7, no. 1, pp. 1-6, 2017.
- J. Nasir and J. Suprianto, “Analisis Fuzzy Logic Menentukan Pemilihan Motor Honda Dengan Metode Mamdani,” Penelitian Bidang Komputer Sains dan Pendidikan Informatika, vol. 3, no. 2, pp.177-186, 2017.
- B. Fechera, J. Kustija, and S. Elvyanti, “Optimasi Penggunaan Membership Function Logika Fuzzy pada Kasus Identifikasi Kualitas Minyak Transformator,” Electrans, vol. 11, no. 2, pp. 27-35, 2012.
- A. Adriansyah and O. Hidyatama, “Rancang Bangun Prototipe Elevator Menggunakan Microcontroller Arduino Atmega 328p”, Jurnal Teknologi Elektro, vol. 4, no.3, pp. 100-112, 2013.
- F. Isdaryani, “Desain Pengendali pH pada Continous Stirred Tank Reactor (CSTR) menggunakan Kontrol Fuzzy,” in Prosiding Industrial Research Workshop and National Seminar, Bandung, 2019, p. 115-120.
Saran
Penulis mempunyai sejumlah saran-saran yang bisa dipergunakan dalam
mengembangkan penelitian ataupun untuk sebagai bahan rujukan penelitian
selanjutnya yang mengangkat tema tentang panel surya berdasarkan dari
kesimpulan yang ada. Beberapa saran dari penulis adalah:
1. Karena sensor suhu LM35 ini masih merupakan sensor suhu yang belum
terlalu stabil, penulis menyarankan untuk mengkalibrasi sensor suhu LM35
lebih lanjut.
2. Agar mendapatkan hasil yang lebih optimal, penulis menyarankan untuk
meminimalisasi daya yang dikonsumsi oleh sistem.
3. Bagi masyarakat yang telah menggunakan panel surya sebagai sumber energi
alternatif, penulis menyarankan agar sistem pengendali suhu ini diterapkan
agar dapat mengoptimalkan energi yang didapat.
mengembangkan penelitian ataupun untuk sebagai bahan rujukan penelitian
selanjutnya yang mengangkat tema tentang panel surya berdasarkan dari
kesimpulan yang ada. Beberapa saran dari penulis adalah:
1. Karena sensor suhu LM35 ini masih merupakan sensor suhu yang belum
terlalu stabil, penulis menyarankan untuk mengkalibrasi sensor suhu LM35
lebih lanjut.
2. Agar mendapatkan hasil yang lebih optimal, penulis menyarankan untuk
meminimalisasi daya yang dikonsumsi oleh sistem.
3. Bagi masyarakat yang telah menggunakan panel surya sebagai sumber energi
alternatif, penulis menyarankan agar sistem pengendali suhu ini diterapkan
agar dapat mengoptimalkan energi yang didapat.
Video [kembali]
Video Teori Fuzzy Logic :
Materi Fuzzy
Video Percobaan Fuzzy Jurnal
Simulasi Matlab
Link Download [kembali]
Download Fuzzy Percobaan disini
Download Fuzzy Realisasi Saran disini
Download HTML disini
Download Jurnal disini



